WeChat:15372285263
手机:15372285263
WhatsApp:15372285263
地址:浙江省丽水市莲都区水阁工业园绿源路7号3栋
Dispositivo de enseñanza y formación de simulación virtual PLC semifísico ZOP
El software de enseñanza de simulación virtual de PLC semifísico, el sistema de simulación virtual de PLC virtual y real puede controlar escenas industriales 3D en tiempo real a través de un PLC virtual interno o un PLC real externo. Actúa como un entorno limitado de automatización en tiempo real, lo que permite la simulación de productos antes de su fabricación real.
Introducción al sistema:
este software ayuda a los usuarios a crear rápidamente sus propias escenas industriales 3D arrastrando y soltando, y puede controlar las escenas industriales 3D en tiempo real a través de un PLC virtual interno o un PLC real externo. Actúa como un entorno limitado de automatización en tiempo real para permitir procesos de simulación, análisis y optimización de productos antes de la fabricación real del producto. El sistema incluye funciones como construcción de escenas industriales en 3D, programación de PLC y depuración del sistema de control de PLC. Tiene un alto valor didáctico en cursos como automatización industrial, mecatrónica , ingeniería eléctrica e ingeniería mecánica
. En la etapa de concepto inicial del diseño automatizado de productos, se puede analizar completamente todo el sistema y se puede observar y experimentar el movimiento mutuo de cada componente. En la escena virtual, los defectos de diseño se pueden modificar fácilmente, se pueden simular diferentes soluciones de diseño y el sistema automatizado del producto se puede mejorar continuamente hasta obtener la solución de diseño óptima.
Proporcione a los usuarios funciones de diseño y modelado independientes, y abra la interfaz subyacente para respaldar el desarrollo secundario del usuario. Es una plataforma integral de verificación de simulación de diseño para la automatización de la Industria 4.0 y proporciona ricos recursos didácticos.
Requisitos de hardware:
Para garantizar un uso fluido del sistema, estos son los requisitos de configuración para el sistema informático:
Sistema operativo: Windows 7 SP1 y superior
Tipo de sistema: sistema operativo de 64 bits
Procesador (CPU): ≥2,5 Ghz (si usa Gafas VR, ≥3.2Ghz)
Memoria: ≥8GB
Disco duro: ≥5GB (espacio de almacenamiento)
Tarjeta gráfica: GPU ≥800MHz Memoria de video ≥1GB (si usa gafas VR, GPU ≥1.6Ghz, memoria de video ≥6GB, como GTX1070)
Versión de Net Framework: V4. Versión 6.2 y superior
1. Características del software
1. Integración del sistema virtual
Los usuarios pueden desarrollar de forma independiente modelos , diseño automático, conexiones de señales eléctricas, depuración virtual y verificar todo el proceso de integración del sistema.
2. La simulación virtual y real de PLC multimarca
admite la simulación semifísica (combinación virtual y real) y la simulación virtual completa de varias marcas principales de PLC.
3. La función de evaluación automática
recopila los datos de acción de la escena del PLC en tiempo real. De acuerdo con los requisitos de la evaluación, el sistema calcula automáticamente los resultados de la evaluación.
4. Enriquecer los recursos didácticos
basados en el programa de estudios del experimento PLC, los recursos didácticos basados en el desarrollo de software se publican y descargan de Internet de forma independiente. Una serie de recursos didácticos de PLC adecuados para escuelas secundarias vocacionales, escuelas vocacionales superiores y estudiantes universitarios, que se enriquecen constantemente.
5. Escalabilidad del módulo (requiere configuración adicional)
El software se basa en un diseño modular y puede ampliarse a la simulación de robots y la simulación de fabricación inteligente.
2. Funciones principales del software
(1) Función de simulación básica
1) Diseño automático
En la escena 3D, los usuarios pueden cambiar rápidamente el proyecto de construcción arrastrando y soltando. Puede mover, rotar, editar, ensamblar y otras operaciones en el modelo para completar la implementación de escenas de trabajo como bloques de construcción. La escena una vez completado el diseño puede ser controlada por varios periféricos.
2) Efectos físicos:
el sistema tiene un motor de física incorporado y el modelo virtual creado tiene efectos físicos que pueden simular fenómenos físicos de la vida real, como gravedad, colisión elástica, etc. En simulaciones de movimiento donde ocurren colisiones, fricción y fuerza, diferentes atributos dinámicos pueden producir diferentes efectos de movimiento.
3) Interacción persona-computadora
El movimiento del equipo virtual es impulsado por programación, y los sensores virtuales pueden retroalimentar el estado real de la escena, dando al equipo virtual las mismas características que el equipo real. La escena se puede operar a través del panel de control del dispositivo virtual, el panel de la HMI y el panel de hardware externo. Operar como escenas reales.
4) Experiencia VR
El software admite gafas VR para lograr una experiencia inmersiva de realidad virtual 3D. Incluye simulación de audio 3D realista de escenas industriales, sumergiendo al experimentador en la escena. Puedes interactuar con la escena a través del mango.
5) El controlador de bus periférico
admite el intercambio de datos con sistemas externos a través del bus. Por ejemplo, se puede conectar a un controlador de hardware externo tipo bus para formar un sistema de simulación virtual-real. O realizar aplicaciones de desarrollo secundario a través del bus. Admite dispositivos de bus Modbus-RTU (como varios sensores y actuadores de puerto serie), dispositivos de bus Modbus-TCP (como varios sensores y actuadores de puerto de red) y dispositivos de bus OPC (como servidores OPC, software WinCC).
6) Conexión eléctrica e integración del sistema
El software admite la integración de varios dispositivos virtuales y la depuración virtual en escenas virtuales. La integración virtual opera principalmente a través del mapeo de puertos: asociando la parte controlable del modelo con un número de puerto específico y operando el dispositivo virtual operando este número de puerto. Como diversas herramientas robóticas, líneas de montaje, sensores, etc. Los puertos incluyen: puertos de nivel, puertos analógicos y puertos de pulso. A través de la operación de señal del puerto, se completa la integración del sistema del robot y se construye un complejo sistema de aplicación del robot.
7) Combinar tecnología virtual y real
para controlar el funcionamiento de dispositivos virtuales puede ser un controlador de software o un controlador de hardware externo. Por lo tanto, es posible establecer una simulación virtual software completa o una simulación virtual y real semifísica para enriquecer el alcance de las aplicaciones.
8) Modelos masivos:
el sistema contiene una biblioteca de componentes completa con equipos industriales típicos y proporciona la correspondiente simulación de movimiento y representación de efectos para los componentes de la biblioteca. Los componentes correspondientes se pueden seleccionar para el diseño de acuerdo con las necesidades de ingeniería. Como diversas cintas transportadoras, cilindros neumáticos , cilindros hidráulicos , servomotores , varillas roscadas, perfiles, botones, interruptores, sensores, CNC.Máquinas herramienta, centros de mecanizado, almacenes tridimensionales, AGV y otros elementos industriales.
9) Desarrollo de modelos:
el sistema abre una interfaz común para la importación de datos CAD, crea componentes de modelo para máquinas no estándar que no están en la biblioteca de componentes y les asigna parámetros y movimiento. El sistema tiene una potente función de lectura de modelos y puede leer modelos 3D en formatos igs, step, stp, OBJ y STL.
10) Desarrollo de
la red modelo de ecología ambiental es un sitio web de intercambio y intercambio de modelos. Los usuarios pueden compartir modelos diseñados, discutir tecnología y realizar transacciones de modelos para aumentar su entusiasmo por la creación y construir un entorno ecológico abierto.
11) Evaluación automática
Este software tiene funciones operativas de recopilación y análisis de datos. El sistema de evaluación automática basado en software primero pide al profesor que establezca las preguntas y genera automáticamente las reglas de puntuación. Durante el proceso de evaluación del estudiante, el sistema registrará el proceso operativo del estudiante, los resultados de la ejecución y los eventos anormales en tiempo real, y calculará la puntuación de la evaluación de acuerdo con las reglas de puntuación del examen. Reducir la carga de trabajo correctivo de los docentes y mejorar la calidad de la enseñanza. Se puede utilizar para pruebas después de clase, avances experimentales, evaluaciones de cursos y exámenes de nivel técnico y vocacional.
12) El desarrollo secundario de scripts
admite la programación del lenguaje de script Python para controlar dispositivos virtuales, que se pueden utilizar para una verificación funcional rápida.
(2) Simulación virtual y real de PLC multimarca
El software integra varios actuadores y sensores, tales como: cintas transportadoras, dispositivos neumáticos, motores, interruptores de botón, sensores, máquinas herramienta CNC, almacenes tridimensionales, accesorios para robots, actuadores personalizados, etc. Estos dispositivos pueden ser controlados por PLC, por lo que este software es un muy buen software de capacitación de PLC.
El software admite PLC Mitsubishi virtual integrado, PLC Siemens virtual , PLC Siemens de hardware de acceso al bus y PLC Mitsubishi de hardware de acceso al bus.
3. Recursos didácticos
Los recursos didácticos se basan en el desarrollo de software, se publican de forma independiente y se descargan de Internet. Sobre la base del programa experimental de PLC, se ha desarrollado y enriquecido continuamente una serie de recursos didácticos de fabricación inteligente de PLC adecuados para escuelas secundarias vocacionales, escuelas vocacionales superiores y estudiantes universitarios.
Sistema de enseñanza de simulación virtual Software de simulación virtual de educación de seguridad de capacitación
mecánica : este software está desarrollado en base a unity3d. El software adopta la forma de itinerancia tridimensional. El movimiento se puede controlar mediante el teclado y la dirección de la lente se puede controlar con el mouse. está equipado con experimentos de distancia de seguridad mecánica, experimentos de dispositivos de protección de seguridad mecánica y evaluación básica del diseño de protección de seguridad mecánica. Cuando el experimento está en progreso, la pantalla itinerante tridimensional utiliza flechas y huellas para indicar al usuario que se mueva a la ubicación experimental. El círculo alrededor del objeto mecánico muestra el radio de trabajo. El proceso experimental va acompañado de un cuadro de diálogo que recuerda al robot tridimensional.
A. El contenido del experimento de distancia de seguridad mecánica incluye el experimento de distancia de seguridad para evitar que las extremidades superiores e inferiores toquen la zona de peligro (dividida en dos alturas de cerca y tamaños de apertura después de seleccionar la entrada, GB23821-2009 "Seguridad mecánica para prevenir"). Las extremidades superiores e inferiores tocan la zona de peligro" aparece frente a la cámara. Requisitos de "Distancia segura", demostración de error: El proceso experimental es que después de que el cuerpo humano ingresa al radio de trabajo del objeto mecánico y se lesiona, el rojo La pantalla y la voz indican que el cuerpo humano ha recibido la lesión mecánica, regresa a la posición original y realiza el siguiente experimento. El paso final es el enfoque correcto.
B. Los experimentos con dispositivos de protección de seguridad mecánica se dividen en interruptores de enclavamiento de seguridad, cortinas de luz de seguridad, tapetes de seguridad, escáneres láser de seguridad y otros experimentos de dispositivos de protección (entrada de seguridad, control de seguridad, salida de seguridad, otros), fabricantes y lista de productos (. interruptor de bloqueo de seguridad, cortina fotoeléctrica de seguridad, alfombra de seguridad, escáner láser de seguridad, controlador de seguridad, relé de seguridad, barandilla de seguridad). Hay un recordatorio de marco azul parpadeante en la ubicación de instalación. Proceso experimental: seleccione la barandilla de seguridad e instálela, seleccione el interruptor de bloqueo de seguridad (o seleccione la cortina de luz de seguridad, la alfombra de seguridad, el escáner láser de seguridad) e instálelo, seleccione la seguridad. controlador e instálelo en la caja de control eléctrico , seleccione el relé de seguridad e instálelo en la caja de control eléctrico, haga clic en el botón de inicio en la caja de control eléctrico. Si ingresa a un área peligrosa, el sistema hará sonar una alarma y el objeto mecánico dejará de funcionar. Seleccione el botón de reinicio en la caja de control eléctrico para detenerse.
C. La evaluación básica del diseño de protección de seguridad mecánica requiere la finalización de la instalación del sistema de seguridad mecánico y la instalación correcta de barandillas de seguridad, interruptores de enclavamiento de seguridad, cortinas de luz de seguridad, tapetes de seguridad, escáneres láser de seguridad, controladores de seguridad, relés de seguridad. , fuentes de alimentación de 24 V, luces de señalización y botón de parada de emergencia, la evaluación se divide en diez puntos de evaluación. Algunos puntos de evaluación tienen 3 opciones, que los estudiantes eligen libremente. Después de seleccionar los 10 puntos de evaluación finales, se envían para confirmación. El sistema calculará automáticamente la puntuación total y cada situación de puntuación de evaluación.
D. El software debe estar en la misma plataforma en su totalidad y no debe mostrarse como recursos separados.
E. Al mismo tiempo, proporcionamos a los clientes el paquete de instalación de realidad virtual de este software para facilitar a los usuarios la expansión a experimentos de realidad virtual y no se requiere instalación ni depuración de software. Software de simulación virtual
de montaje mecánico y montaje de instaladores : Este software está desarrollado en base a unity3d, con calidad de imagen opcional de 6 niveles. Está equipado con diseño y desmontaje virtual y montaje de reductores y estructuras de ejes , diseño y simulación de mecanismos mecánicos comunes. biblioteca de recursos, mecanismo de maquinaria típica (desmontaje y montaje virtual de motores de gasolina), el software es un software completo y no pueden ser recursos individuales.
A. El diseño del reductor y la interfaz de desmontaje virtual pueden elegir un reductor de engranajes cónicos con engranaje helicoidal, un reductor de engranajes cilíndricos expandidos de dos etapas, un reductor de engranajes cilíndricos cónicos, un reductor de engranajes cilíndricos coaxiales, un reductor de engranajes cónicos y un reductor de engranajes cilíndricos de una etapa.
Reductor de engranaje cónico helicoidal: después de ingresar al software, el contenido del ensamblaje se reproduce automáticamente. Cada paso del video tiene una descripción de texto
. Reductor de engranaje cilíndrico expandible secundario: después de ingresar al software, el contenido se reproduce en forma de video. El contenido del vídeo debe incluir: nombre de la pieza (escanee el código QR para ver los nombres de las piezas), demostración de desmontaje y montaje (incluido el desmontaje y montaje), desmontaje y montaje virtual (incluido el general, eje de baja velocidad, eje de velocidad media, alta). -eje de velocidad, tapa de caja, asiento de caja)
reductor de engranajes cilíndrico cónico, reductor de engranajes cilíndrico coaxial, reductor de engranajes cónicos, reductor de engranajes cilíndrico de primer nivel: haga clic para ingresar y saltar automáticamente a la interfaz de dibujos. Todos los modelos son modelos tridimensionales. Al hacer clic en las piezas, se muestran los nombres de las piezas y la vista de 360° está disponible. Girar, ampliar, reducir, traducir y, al mismo tiempo, todo el reductor se puede desmontar y montar a través de la función de piezas móviles. Al mismo tiempo, puedes seleccionar el botón de inicio para volver al estado original del reductor. El reductor de engranajes cónicos y el reductor de engranajes cilíndricos de primera etapa han agregado la función de insertar una sección transversal, y la sección transversal se puede arrastrar libremente para observar la estructura interna del reductor.
B. Diseño de estructura de eje e interfaz virtual de desmontaje y montaje, reconocimiento de piezas opcionales, demostración de desmontaje y montaje y funcionamiento real.
1. Reconocimiento de piezas: modelo tridimensional y nombre de la pieza, incluido engranaje helicoidal, tapa del extremo sin orificio, acoplamiento, chaveta de acoplamiento, eje, chaveta del engranaje, tapa del extremo del orificio, manguito del eje, rodamiento rígido de bolas, cualquier pieza se puede girar 360 °
2. Demostración de desmontaje y montaje: Hay 2 casos integrados. Cuando mueve el ratón a una determinada posición de la pieza (excepto la base y el asiento del cojinete), la pieza se ampliará automáticamente y se mostrará el nombre de la pieza. Y botones de montaje, y la función será controlada automáticamente por el software. Complete el desmontaje y montaje de la estructura del sistema del eje. Todas las escenas tridimensionales se pueden girar, ampliar, reducir y trasladar 360° en todas las direcciones.
3. Operación práctica: Las piezas tridimensionales se colocan cuidadosamente sobre la mesa. Los estudiantes seleccionan manualmente las piezas correspondientes y las mueven a la estructura del eje. Las piezas se pueden instalar solo cuando se colocan en el orden correcto y en la forma correcta. Posición Hay un botón de reinicio para facilitar que los estudiantes reinicien. Cuando mueve el mouse a una ubicación determinada de la pieza (excepto la base y el asiento del cojinete), la pieza se ampliará automáticamente y se mostrará el nombre de la pieza.
C. Diseño y simulación de mecanismos mecánicos comunes, diseño y análisis de mecanismos de cuatro barras con bisagras opcionales, diseño y análisis de mecanismos de balancín de manivela tipo I\II, diseño y análisis de mecanismos deslizantes de manivela desplazados, diseño y análisis de mecanismos de varilla guía de giro de manivela, bisagra de cuatro barras. Mecanismo de barra con trayectoria integrada, leva de varilla de empuje de rodillo excéntrico de acción lineal y leva de varilla de empuje de fondo plano de acción lineal de centrado .
1. Cada mecanismo debe poder ingresar los parámetros correspondientes, y el software puede calcular automáticamente los parámetros, realizar simulación de movimiento y dibujar curvas automáticamente.
D. La biblioteca de recursos de mecanismos incluye 11 tipos de mecanismos de enlace plano, 5 tipos de mecanismos de leva, 6 tipos de mecanismos de engranajes, 8 tipos de mecanismos de transmisión, 11 tipos de mecanismos de apriete, 6 tipos de mecanismos de tren de engranajes y 8 tipos de otros. mecanismos (simulación de equipos mecánicos)
E, desmontaje y montaje virtual de motores de gasolina, demostración de montaje y desmontaje del cárter opcional, demostración de montaje y desmontaje del cárter virtual, demostración de montaje y desmontaje del tren de válvulas, montaje virtual del tren de válvulas
1. Demostración de montaje y desmontaje del cárter y montaje del tren de válvulas y La demostración de desmontaje tiene botón de desmontaje, botón de ensamblaje, reinicio y botón de observación de descomposición. Cuando el mouse se mueve a una determinada posición de la pieza, la pieza se ampliará automáticamente y se mostrará el nombre de la pieza. El software completa automáticamente el desmontaje y el montaje. la estructura del sistema de ejes. Cuando se utiliza el botón de observación de descomposición, el modelo 3D del cárter o sistema de distribución de gas muestra automáticamente una vista explosionada, que se puede girar, ampliar, reducir y trasladar 360°.
2. Las partes 3D del conjunto virtual del cárter y el . El ensamblaje virtual del sistema de distribución de gas está cuidadosamente organizado. Cuando se colocan en el escritorio, los estudiantes seleccionan manualmente las piezas correspondientes y las mueven al mecanismo. Las piezas se pueden instalar solo cuando se colocan en el orden correcto y en la posición correcta. Botón de reinicio para facilitar que los estudiantes vuelvan a realizar el experimento virtual. Cuando mueve el mouse a ciertas ubicaciones de piezas, los nombres de las piezas se muestran automáticamente.
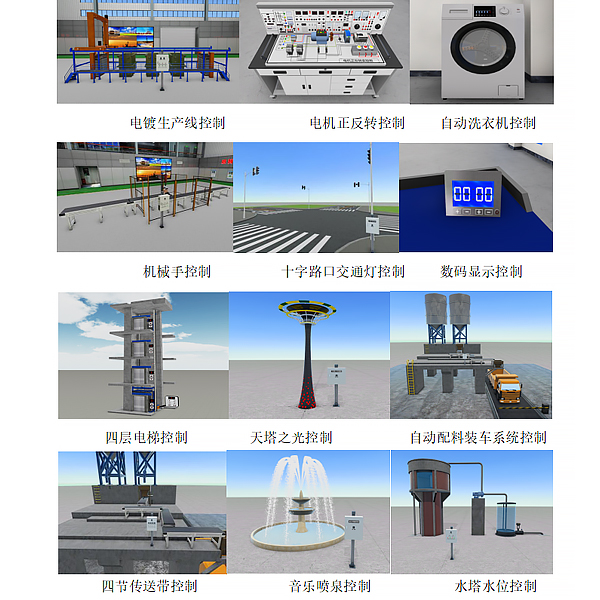
(1) Paquete de recursos de simulación de experimentos básicos de PLC (configuración estándar)
El paquete de recursos de simulación de experimentos básicos de PLC se compila de acuerdo con el experimento tutorial "Aplicación de programación de controladores programables". Todos los experimentos pueden ser puramente simulación virtual y también admiten la combinación virtual con la simulación de PLC. simulación (semifísica)). Cada recurso incluye: materiales de capacitación, videos y casos de ingeniería.
Proyectos experimentales:
1. Control de arranque de secuencia del motor
2. Control de arranque estrella-triángulo del motor
3. Control de pantalla digital
4. Control de fuente musical 5.
Control de línea de montaje
6. Control de semáforo en cruce
7. Control del nivel de agua de la torre de agua
8. Luz de la torre del cielo 9. Control
automático del sistema de carga por lotes
10. Control de la cinta transportadora de cuatro secciones
11. Control de múltiples dispositivos de mezcla de líquidos
12. Control automático del laminador
13. Control de la máquina clasificadora de correo
14. Control del robot 15. Control del elevador
de cuatro pisos 16. Lavado automático control de la máquina 17. Control de la línea de producción de galvanoplastia 18. Control del motor de CC 19. Control PID de temperatura 20. Control de velocidad de bucle abierto de conversión de frecuencia analógica 21. Control de velocidad de bucle cerrado de conversión de frecuencia analógica (2) Paquete de recursos de simulación extendida de innovación industrial PLC PLC industrial Los recursos de simulación de innovación son El modelo se desarrolla 1:1 basándose en equipos de automatización industrial de uso común. Permitir a los estudiantes dominar las aplicaciones industriales típicas en la escuela y sentar una base sólida para un futuro empleo. Todas las simulaciones admiten simulación virtual PLC y simulación semifísica. Cada recurso incluye: materiales de capacitación, videos y casos de ingeniería. Proyectos experimentales: 1. Control de bloqueo de línea de transmisión 2. Control paralelo de línea de montaje 3. Servocontrol 4. Control de montaje de robot en ángulo recto 5. Paletizado de robot de estantería 6. Almacén tridimensional 7. Garaje tridimensional 8. Cama móvil mecánica truss carga y descarga 9. Control de bits de líquido (3)
Paquete de recursos de simulación extendido de desarrollo integrado de PLC El paquete de recursos de simulación de desarrollo integrado de PLC toma como ejemplo un almacén vertical automatizado típico, a partir de las necesidades del producto, analiza los requisitos del sistema de control, el diseño de la solución del sistema de control, y hardware del sistema de control, selección de equipos, diseño e instalación de equipos, conexión eléctrica de equipos, diseño de software de sistemas de control, desarrollo y depuración de programas de PLC, desarrollo de interfaz hombre-máquina, operación de integración de sistemas, verificación de funciones y desempeño. Complete el proceso de desarrollo integrado general de productos de automatización industrial y se base en el desarrollo y la depuración de software de simulación virtual. El equipo es un dispositivo virtual que utiliza software de simulación, el diseño y la instalación del equipo utilizan la función de diseño del software de simulación y la conexión eléctrica del equipo utiliza la función de conexión eléctrica del software. La programación y depuración de simulación de PLC utiliza la función de depuración y desarrollo de PLC virtual del software de simulación. Los recursos incluyen: materiales de capacitación, videos y casos de ingeniería. Contenido del experimento: 1. Experimento del proceso de desarrollo de proyectos industriales 2. Experimento de selección del diseño de control industrial
3. Experimento de diseño de escena de PLC
4. Experimento de configuración de mapeo de datos
5. Experimento de diseño de diagrama eléctrico
6. Experimento de depuración y desarrollo de HMI
7. Experimento de depuración y programación de programas de biblioteca
(4) Paquete de recursos de simulación extendido de aplicación integral de PLC Paquete de recursos de aplicación integral de PLC, este El sistema integra orgánicamente tecnología robótica, tecnología de inspección visual, tecnología de línea de ensamblaje, tecnología hidráulica, tecnología de control PLC, tecnología de comunicación de Internet de las cosas e ingeniería de sistemas. El sistema consta de 11 estaciones de trabajo unitarias, que incluyen una unidad de apilado automático de palés, una unidad de alimentación, una unidad de simulación de procesamiento electromecánico, una unidad de taponado, una unidad de fijación, una unidad de manipulación robótica, una unidad de manipulación robótica, una unidad de pulverización y secado, una unidad de prueba y una unidad de almacenamiento logístico, unidad de control maestro y otros componentes. Complete el proceso completo desde el ensamblaje y almacenamiento del producto en blanco hasta el terminado. Teniendo en cuenta que la línea de producción física tiene las características de alto costo, gran área, alta densidad de conocimiento, alto riesgo y dificultad de enseñanza, todos los experimentos de este proyecto se completaron en un entorno de simulación. Cada estudiante tiene un entorno de desarrollo independiente en el software de simulación, construye su propia fábrica inteligente desde cero, comenzando desde la planificación de la línea de producción, la selección, el diseño, el diseño, la depuración virtual de las estaciones de trabajo de la unidad y la depuración conjunta del sistema completo de fábrica inteligente. Todos los programas de PLC, programas de robot y programas de visión se depuran y verifican virtualmente en el software de simulación y se pueden descargar directamente a la línea de producción física para su operación. Los recursos incluyen: materiales de capacitación, videos y casos de ingeniería. Proyectos experimentales: 1. Experimento de control de unidad de apilado y desmontaje automático de pallets 2. Experimento de control de unidad de alimentación 3. Experimento de unidad de simulación de procesamiento electromecánico 4. Experimento de control de unidad de recubrimiento 5. Experimento de control de manipulación de robot 6. Experimento de control de unidad de roscado de pasadores 7. Unidad de intercambio telescópico Experimento de control 8. Experimento de control de la unidad de secado por aspersión 9. Experimento de control de la unidad de detección 10. Experimento de control de la unidad de clasificación del robot 11. Experimento de control de la unidad de logística 12. Experimento de red PLC 13. Experimento de depuración del funcionamiento general del sistema
- 上一篇:Dispositivo de entrenamiento de simulación de respuesta de emergencia de estación de metro ZOPGD-19
- 下一篇:Dispositivo de entrenamiento de simulación virtual gemelo digital de fabricación inteligente ZOP